Jonathan Yang

Hello! I’m a second year PhD student at Stanford University advised by Professor Chelsea Finn and Dorsa Sadigh. My research interests lie in developing large-scale foundational robotic agents that are broadly generalizable to new environments and tasks. My long-term goal is to enable scalable lifelong robotic learning in the real world.
Previously, I’ve obtained a B.S. in EECS at UC Berkeley and conducted research in the Robotic AI and Learning Lab.
For more information, check out my CV and [Google Scholar][https://scholar.google.com/citations?user=UAWfBEoAAAAJ&hl=en]!
selected publications
-
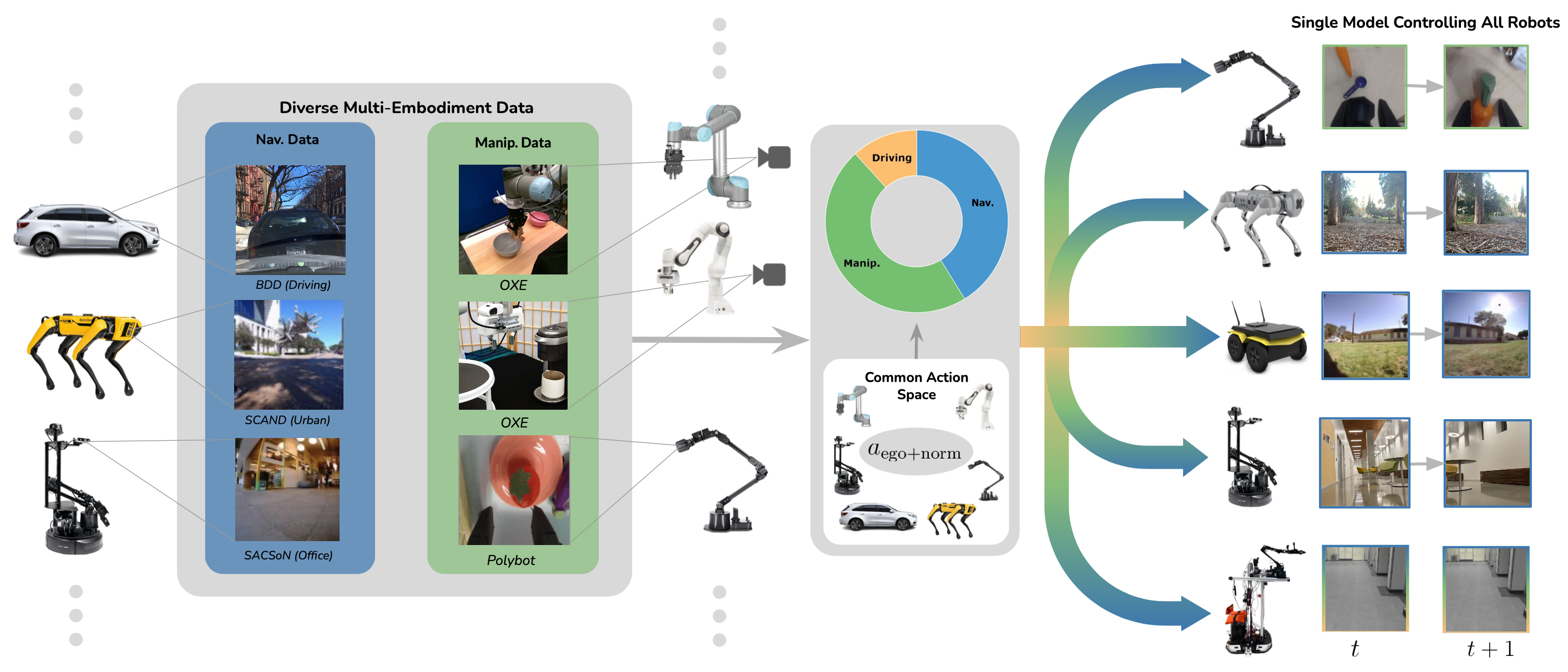 Extreme Cross-Embodiment Learning for Manipulation and Navigation2024
Extreme Cross-Embodiment Learning for Manipulation and Navigation2024 -
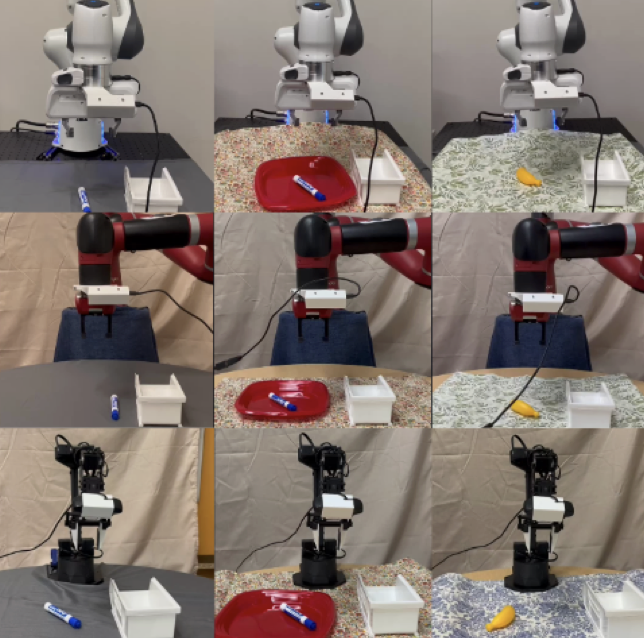 Polybot: Training One Policy Across Robots While Embracing Variability2023
Polybot: Training One Policy Across Robots While Embracing Variability2023 -
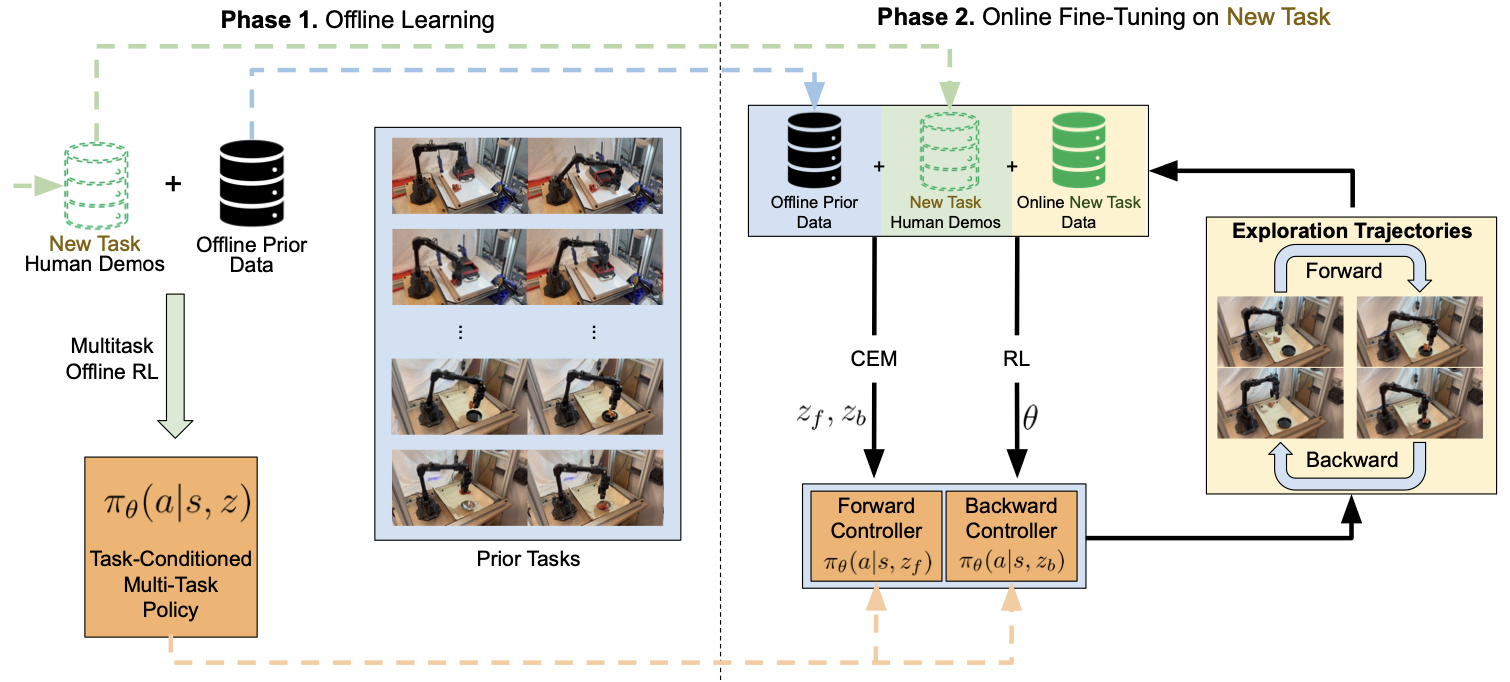 Don’t Start From Scratch: Leveraging Prior Data to Automate Robotic Reinforcement Learning2022
Don’t Start From Scratch: Leveraging Prior Data to Automate Robotic Reinforcement Learning2022 -
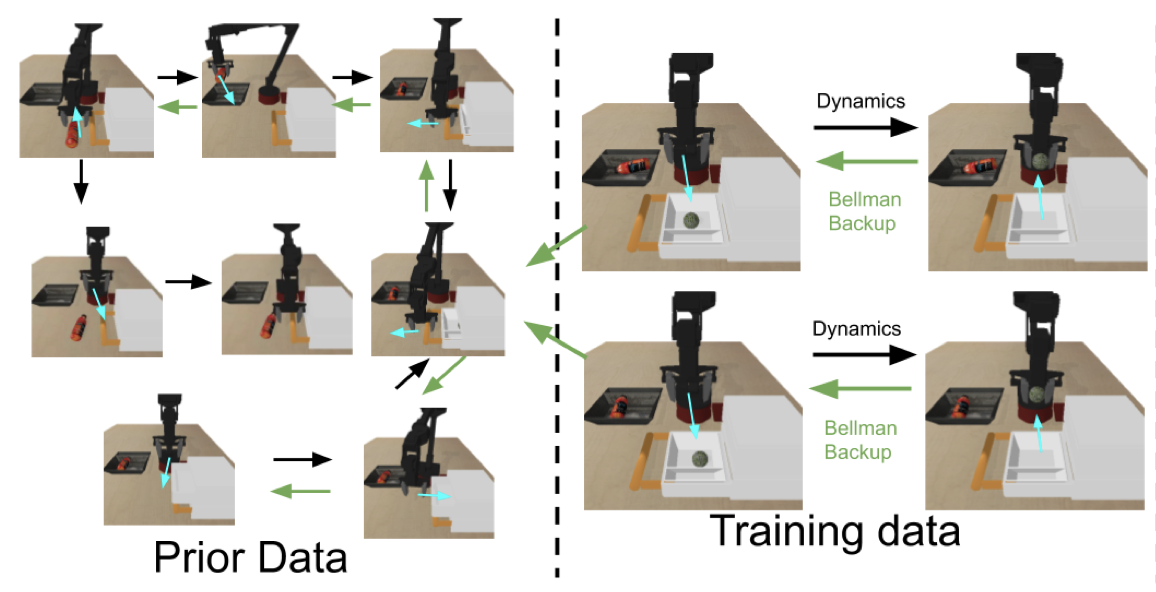 COG: Connecting New Skills to Past Experience with Offline Reinforcement Learning2020
COG: Connecting New Skills to Past Experience with Offline Reinforcement Learning2020 -
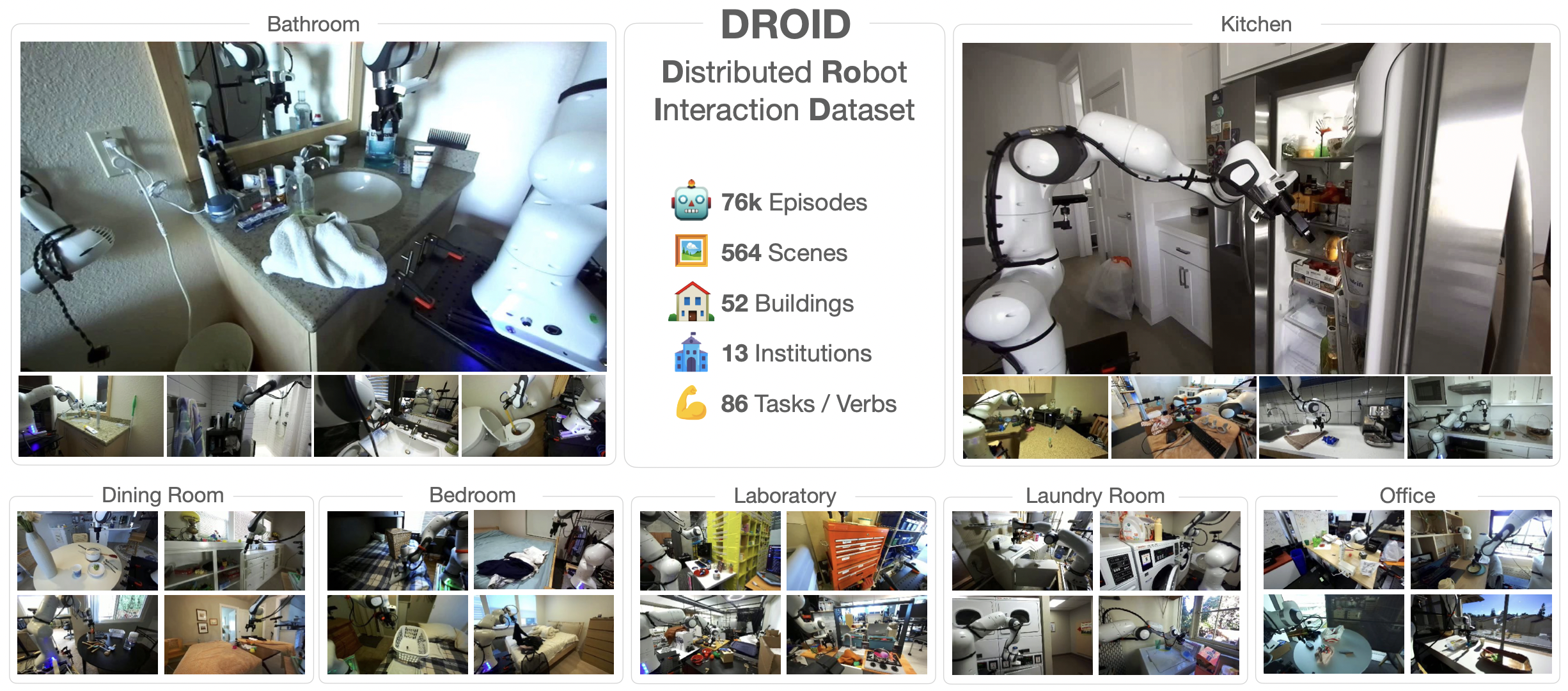 DROID: A Large-Scale In-The-Wild Robot Manipulation Dataset2024
DROID: A Large-Scale In-The-Wild Robot Manipulation Dataset2024




